![\includegraphics[]{figures/flyPhotometer.eps}](img309.png) |
The Fly's Eye photometric array was specifically designed to detect
the optical emission wavelengths and space-time development
predicted for elves. The spectral emissions were expected to be
dominated by
![]() [Taranenko et al., 1993b], especially as observed from
the ground (Figure 3.6). The primary temporal
and spatial requirement was to resolve an apparent motion of
luminosity over
[Taranenko et al., 1993b], especially as observed from
the ground (Figure 3.6). The primary temporal
and spatial requirement was to resolve an apparent motion of
luminosity over ![]() 200 km in
200 km in ![]() 1 ms [Inan et al., 1996c]. To
resolve such an event with 10 detectors from a range of 500 km (a
typical distance for demonstrated successful observation of
sprites overlying distant storms) requires a temporal resolution of
1 ms [Inan et al., 1996c]. To
resolve such an event with 10 detectors from a range of 500 km (a
typical distance for demonstrated successful observation of
sprites overlying distant storms) requires a temporal resolution of
![]() 50
50 ![]() s and an angular resolution in at least one dimension of
s and an angular resolution in at least one dimension of
![]() 2.3
2.3![]() .
.
An elegant arrangement to achieve such a measurement would be to use one large lens to image the sky onto an array of focal plane detectors. However, because of the difficulty in obtaining an appropriately large and convex (Fresnel) lens, and moreover because of the advantage of being able to have truly contiguous and even overlapping detector fields-of-view of arbitrary shape and varying sizes, separate optics were built for each detector. Photodiodes, photomultiplier tubes (PMTs), and charge-coupled devices (CCDs) could all have met the speed criterion, but photodiodes have inferior sensitivity and the cost and time required to develop a custom CCD high-speed clocking circuit were prohibitive.
Figure 3.7 shows a schematic overview of the Fly's Eye instrument
designed and built by the author, and Figure 3.9 shows the
instrument deployed at Langmuir Laboratory. Nine individually mounted
photometers (P1-P9) provide the angular resolution (![]() 2.2
2.2![]() ) to
resolve flash features 20 km wide at a range of 500 km, and four
additional photometers (P10-P13) survey larger fields-of-view. Each detector
consists of a single compound lens, optical filter, and a Hamamatsu
HC-124-01 or HC-125-01 PMT with built-in transimpedance preamplifier,
as shown in Figure 3.8. The pointing direction of each
photometer is determined by its mechanical mount, and the shape of its
field-of-view is determined by a focal plane mask. The PMT photocathodes are
sensitive between 185 nm and 800 nm wavelength (see PMT response curve
in Figure 3.6), in and near the visible range.
Two different kinds of optical filter, detailed in
Figure 3.6, are used on different photometers,
and may be used to determine excitation ratios, as outlined in
Section 3.3.3. Empirical determination of the
photometer responses and fields-of-view is discussed in Sections
3.4.1 and 3.4.2.
) to
resolve flash features 20 km wide at a range of 500 km, and four
additional photometers (P10-P13) survey larger fields-of-view. Each detector
consists of a single compound lens, optical filter, and a Hamamatsu
HC-124-01 or HC-125-01 PMT with built-in transimpedance preamplifier,
as shown in Figure 3.8. The pointing direction of each
photometer is determined by its mechanical mount, and the shape of its
field-of-view is determined by a focal plane mask. The PMT photocathodes are
sensitive between 185 nm and 800 nm wavelength (see PMT response curve
in Figure 3.6), in and near the visible range.
Two different kinds of optical filter, detailed in
Figure 3.6, are used on different photometers,
and may be used to determine excitation ratios, as outlined in
Section 3.3.3. Empirical determination of the
photometer responses and fields-of-view is discussed in Sections
3.4.1 and 3.4.2.
In addition to the thirteen amplified photometer signals, the Fly's
Eye includes an Applied Geomagnetics two-axis electronic clinometer
used to record automatically the viewing elevation angle, and receives
one or two sferic channels from an ELF/VLF (30 Hz to 25 kHz) receiver
(Figure 3.7). Using custom software developed in Visual
C++, these sixteen signals (or any chosen subset) are sampled
continuously in a circular buffer by two National Instruments
PCI-MIO-16E-1 data acquisition boards using differential inputs in a
Windows NT computer. Sample periods for each channel varied from
30 ![]() s in 1996 to 10
s in 1996 to 10 ![]() s in 1999 as the computer hardware was
upgraded each year. Acquisition cycles (one per event) are started
using a global positioning system (GPS) 1 Hz pulse for precise
time synchronization. Trigger circuitry for several photometers and a
sferic channel is used to trigger the software to save a specified portion of
pre-trigger and post-trigger data from the circular buffer. In 1999
the sferic trigger circuitry included a high-pass filter and rectifier
in order to respond to VLF pulses of either polarity. Typically 1 to
2 seconds of data are recorded for each trigger event. After a
trigger, the data acquisition system does not record data until the
next GPS second begins.
s in 1999 as the computer hardware was
upgraded each year. Acquisition cycles (one per event) are started
using a global positioning system (GPS) 1 Hz pulse for precise
time synchronization. Trigger circuitry for several photometers and a
sferic channel is used to trigger the software to save a specified portion of
pre-trigger and post-trigger data from the circular buffer. In 1999
the sferic trigger circuitry included a high-pass filter and rectifier
in order to respond to VLF pulses of either polarity. Typically 1 to
2 seconds of data are recorded for each trigger event. After a
trigger, the data acquisition system does not record data until the
next GPS second begins.
The pointing direction of each photometer is mechanically fixed with respect to the Fly's Eye's base. The focal plane screen on each photocathode sets the size and shape of the field-of-view. Small adjustments can be made to its position by means of the adjustment screws holding the photomultiplier assembly (Figure 3.8).
In order to quantify the actual fields-of-view once the array was built, the
photometer angular responses and fields-of-view were calibrated by scanning the
Fly's Eye in azimuth and elevation past a fixed light source. Because the
Fly's Eye photometers are mounted up to ![]() 50 cm apart from each other,
parallax (i.e., the difference in the apparent direction of an object
as seen from two different points) is more significant than
0.1
50 cm apart from each other,
parallax (i.e., the difference in the apparent direction of an object
as seen from two different points) is more significant than
0.1![]() for light sources closer than
for light sources closer than ![]() 300 m. The
calibration light source with small (1 cm
300 m. The
calibration light source with small (1 cm![]() 1 cm) aperture and
steady output was placed
1 cm) aperture and
steady output was placed ![]() 360 cm from the Fly's Eye. Intensities in
each photometer were recorded for a large number of electronically
recorded elevations and at azimuths every 0.5
360 cm from the Fly's Eye. Intensities in
each photometer were recorded for a large number of electronically
recorded elevations and at azimuths every 0.5![]() . Knowledge of
the precise geometry of the Fly's Eye photometers
was used to correct for parallax. The position of each aperture with
respect to the elevation (
. Knowledge of
the precise geometry of the Fly's Eye photometers
was used to correct for parallax. The position of each aperture with
respect to the elevation (![]() ) and azimuth (
) and azimuth (![]() ) rotation axes was
used to calculate, for each measurement and each photometer, the
effective elevation and azimuth for a light source at infinite range.
Figure 3.10 shows an example of the parallax in photometer 1 for
one position of the Fly's Eye. The rotated locations
) rotation axes was
used to calculate, for each measurement and each photometer, the
effective elevation and azimuth for a light source at infinite range.
Figure 3.10 shows an example of the parallax in photometer 1 for
one position of the Fly's Eye. The rotated locations
![]() of the
apertures were calculated in a cartesian coordinate system centered at
the intersection of the rotation axes. Positions
of the
apertures were calculated in a cartesian coordinate system centered at
the intersection of the rotation axes. Positions
![]() of the
apertures for zero elevation and at a reference azimuth were measured,
and
of the
apertures for zero elevation and at a reference azimuth were measured,
and
![]() were calculated as
were calculated as
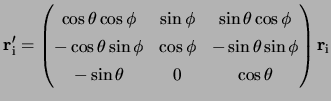
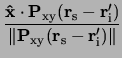
The effective azimuth
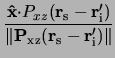
![]() and elevation
and elevation
![]() , corrected for parallax,
are then given by
, corrected for parallax,
are then given by
 |
|||
 |
![\includegraphics[]{figures/fovContours.eps}](img331.png) |
The resulting data giving measured photometric intensities at viewing
directions (
![]() ,
,
![]() ) were gridded for each photometer and
contours of the measured sensitivity are shown in
Figure 3.11. The fields-of-view do not quite correspond to the ideal
design arrangement. However, once characterized, the particular field-of-view
arrangement can be taken into account in detailed data analysis such
as that given in Sections 4.3 and
5.1.4. Figure 3.11 shows the fields-of-view in
1998. Prior to 1998, the blue photometers P10 and P12 roughly overlaid
P2 and P8, respectively, but were
) were gridded for each photometer and
contours of the measured sensitivity are shown in
Figure 3.11. The fields-of-view do not quite correspond to the ideal
design arrangement. However, once characterized, the particular field-of-view
arrangement can be taken into account in detailed data analysis such
as that given in Sections 4.3 and
5.1.4. Figure 3.11 shows the fields-of-view in
1998. Prior to 1998, the blue photometers P10 and P12 roughly overlaid
P2 and P8, respectively, but were ![]() 3 times as large.
3 times as large.
Figure 3.12 shows a cross-section along the azimuth and through the
peak of each photometer response in order to demonstrate the low
``cross-talk'' attained with the focal plane masks. Outside the
![]() 2
2![]() horizontal fields-of-view of the narrow photometers P1
to P9 the response remains below the peak response by a factor of 25
to more than 100. P4 satisfies this criterion but is highly saturated at the
levels used in this calibration.
horizontal fields-of-view of the narrow photometers P1
to P9 the response remains below the peak response by a factor of 25
to more than 100. P4 satisfies this criterion but is highly saturated at the
levels used in this calibration.
Surface brightnesses are subsequently expressed in kiloRayleighs (kR) at 700 nm for photometers bearing a red filter (P1 to P9, P11, and P13) and at 400 nm for those with a blue filter (P10 and P12).
![\includegraphics[]{figures/flyOverview.eps}](img308.png)
![\includegraphics[width=9cm]{figures/flyDeployed.eps}](img310.png)
![\includegraphics[]{figures/parallax.eps}](img311.png)
![\includegraphics[]{figures/fovXS.eps}](img333.png)